unirobot 5P pro de FMB avec système de mesure uniprove T4A de FMB
Automatisation d'un tour MIYANO BNE-51 SY6
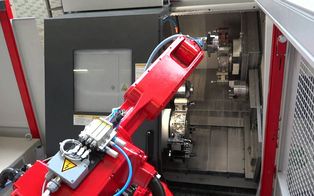
Tournage automatisé de culots et de tubes magnétiques sur un tour MIYANO BNE-51 SY6 avec notre système d'automatisation FMB unirobot 5P pro. Chargement et déchargement des pièces au moyen d'un robot industriel à 6 axes FANUC M-10iA/12 d'une capacité de charge de 12 kg. La manipulation des pièces est prise en charge par un double système de préhension universel. Les pièces sont alimentées et évacuées sur des supports de pièces. La cellule d'automatisation est positionnée devant le tour.
Notre système de mesure uniprove T4A FMB est intégré dans la cellule robotisée pour permettre la mesure automatique des composants avec transfert des valeurs mesurées à la machine-outil à des fins de correction des outils.
Détails Unirobot P pro
Détails Uniprove